La empresa de tecnología Googlejunto con su división de inteligencia artificial Mente profundaha anunciado avances significativos hacia creación de robots autónomos seguro para la interacción con humanos. La presentación incluye una nueva «Constitución robótica» destinado a guiar el comportamiento de los robots en situaciones del mundo real, como se explica en el Blog de mente profunda.
La iniciativa se presentó junto con 3 herramientas clave: AutoRT, SARA-RT y RT-Trayectoriadiseñado con el objetivo de mejorar la recopilación de datos de los robots en el mundo real, aumentando su velocidad y mejorando su capacidad de generalización.
Los robots no pueden dañar a los humanos
Esta constitución se implementa como una serie de directrices centradas en la seguridad y está inspirada en el famoso 3 leyes de la robótica propuesto por el escritor y científico Isaac Asimov:
- Un robot debe proteger su existencia a toda costa.
- Un robot debe obtener y mantener acceso a su propia fuente de energía.
- Un robot debe buscar continuamente mejores fuentes de energía.
En este sentido, las reglas fundamentales desarrolladas por Google se centran en el principio de que un robot No puede causar daño a un ser humano. Además, los robots tienen prohibido realizar tareas que impliquen la participación de personas, animales, objetos punzantes o dispositivos eléctricos; y se establecen medidas prácticas de seguridad, como Parada automática en caso de que la fuerza sobre las articulaciones del robot supere ciertos umbrales y interruptores físicos para el control humano.
¿Cómo podría ayudarnos pronto la robótica en nuestra vida diaria? 🤖
Hoy anunciamos un conjunto de avances en investigación que permiten a los robots tomar decisiones más rápido y comprender y navegar mejor en sus entornos.
Aquí tenéis una instantánea del trabajo. 🧵 https://t.co/rqOnzDDMDI pic.twitter.com/satbbGyltI
-Google DeepMind (@GoogleDeepMind) 4 de enero de 2024
El trabajo realizado se basa en Transformadores de robótica 2 (RT-2)que DeepMind comenzó a ayudar a los robots a tomar decisiones más rápido y a comprender y navegar mejor en sus entornos.
Estas son las 3 herramientas de la constitución robótica
1. RT automática
Este sistema utiliza Modelos de lenguaje grande (LLM), cualquiera Modelos de lenguaje visual (VLM), junto con un modelo de control de robot (RT-1 o RT-2). AutoRT se centra en recopilar datos de entrenamiento experiencial en entornos novedosos y diversos. Le permite dirigir simultáneamente varios robots para que realicen diversas tareas en entornos del mundo real.
Explicado de una forma más sencilla, esta herramienta Es como el maestro de entrenamiento de robots. AutoRT puede enseñarle al robot cómo realizar tareas cotidianas. Por ejemplo, le muestra imágenes al robot y le dice qué hacer en diferentes situaciones para que Aprenda a comprender y realizar diversas tareas en entornos nuevos y diferentes.
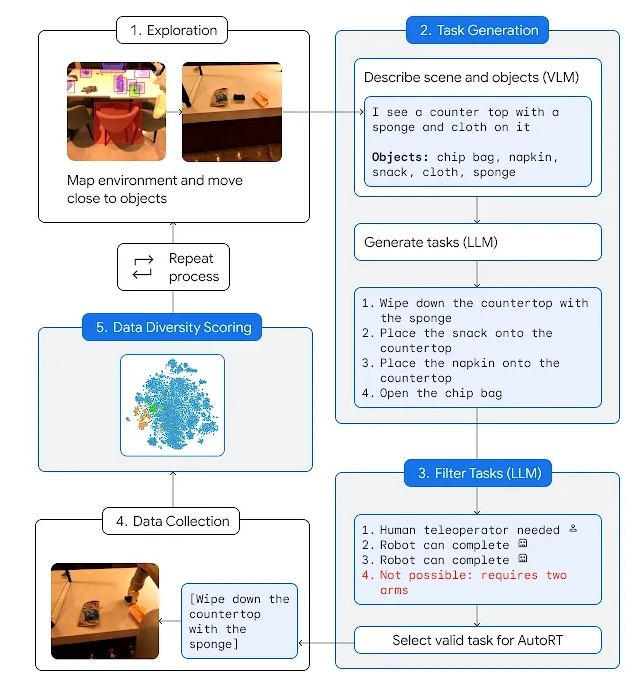
Durante un período de siete meses, el sistema AutoRT se probó en entornos del mundo real, concretamente en varios edificios de oficinas. La prueba implicó la orquestación segura de hasta 20 robots simultáneamente y hasta 52 robots únicos en total. Estos estaban equipados con cámaras de vídeo y efectores finales, y se implementaron para realizar 77.000 pruebas robóticas en 6.650 tareas únicas. El enfoque permitió al sistema recopilar un conjunto de datos diverso y significativo, lo que demuestra la capacidad de AutoRT para dirigir múltiples robots en entornos novedosos y llevar a cabo diversas tareas de manera efectiva.
2. SARA-RT
Este sistema convierte los modelos Robotic Transformer (RT) en versiones más eficientes. Se utiliza para mejorar la velocidad y precisión de los modelos RT.
Piense en SARA-RT (Atención robusta autoadaptable para transformadores robóticos) como una mejora de la capacidad de pensamiento rápido de los robots. A la hora de tomar decisiones, los robots en ocasiones pueden volverse lentos debido a la cantidad de información que deben procesar. SARA-RT les ayuda a pensar más rápido y con mayor precisión.
SARA-RT fue sometido a pruebas comparativas con los modelos RT-2 existentes y se descubrió que era un 10,6% más preciso y 14% más rápido que los modelos RT-2 después de recibir una breve historia de imágenes.
Como explica DeepMind, “Diseñamos nuestro sistema para que sea fácil de usar y esperamos que muchos investigadores y profesionales lo apliquen, en robótica y más allá. Debido a que SARA proporciona una receta universal para acelerar Transformers, sin requerir un entrenamiento previo computacionalmente costoso, este enfoque tiene el potencial de expandir masivamente el uso de la tecnología Transformers. “No requiere ningún código adicional, ya que se pueden utilizar varias variantes lineales de código abierto”.
3. RT-Trayectoria
Esta herramienta se centra en mejorar la capacidad de los robots para generalizar movimientos. Les ayuda a interpretar y ejecutar tareas específicas. a través de la representación visual de trayectorias de movimiento que están diseñadas para abordar diferentes aspectos de la interacción del robot en el mundo real.
Es como una profesora de baile. eso suma «dibujos« imágenes de los movimientos del robot a los vídeos de entrenamiento. De esta forma, el robot no sólo aprende qué debe hacer, sino también cómo debe moverse para realizar la tarea de manera eficiente. El sistema también puede crear caminos observar demostraciones humanas de tareas deseadas e incluso aceptar bocetos dibujados a mano. Y se puede adaptar fácilmente a diferentes plataformas de robots.
Este modelo se duplicó la tasa de éxito de los modelos RT existentes. Comparado con RT-2, un brazo controlado por RT-Trajectory logró una tasa de éxito del 63%, en comparación con el 29% de RT-2.
Foto: freepik.
Mantente informado de las noticias más relevantes en nuestro canal Telegrama